Robotics Portfolio
Engineering autonomous systems that survive field conditions.
Robotics engineer focused on marine autonomy, embedded hardware, mechanical integration, and the hard part of robotics: getting platforms out of the lab and into real operating environments.

Featured systems
Platforms built for observation, mobility, and difficult environments.
Selected systems spanning subsea hardware, autonomous vessels, underwater locomotion, and spherical robotic architectures.

Subsea robotics
FEA
Mechanical development
Schmidt Ocean Institute
Subsea robotic hardware work covering pressure enclosure design support, robotic arm mount design, mechanical development, and simulation-led structural validation.

Surface vessel
ROS
Environmental monitoring
Varuna
A field-ready autonomous vessel designed for sub-surface measurement, monitoring, and persistent operation in shallow waterways.
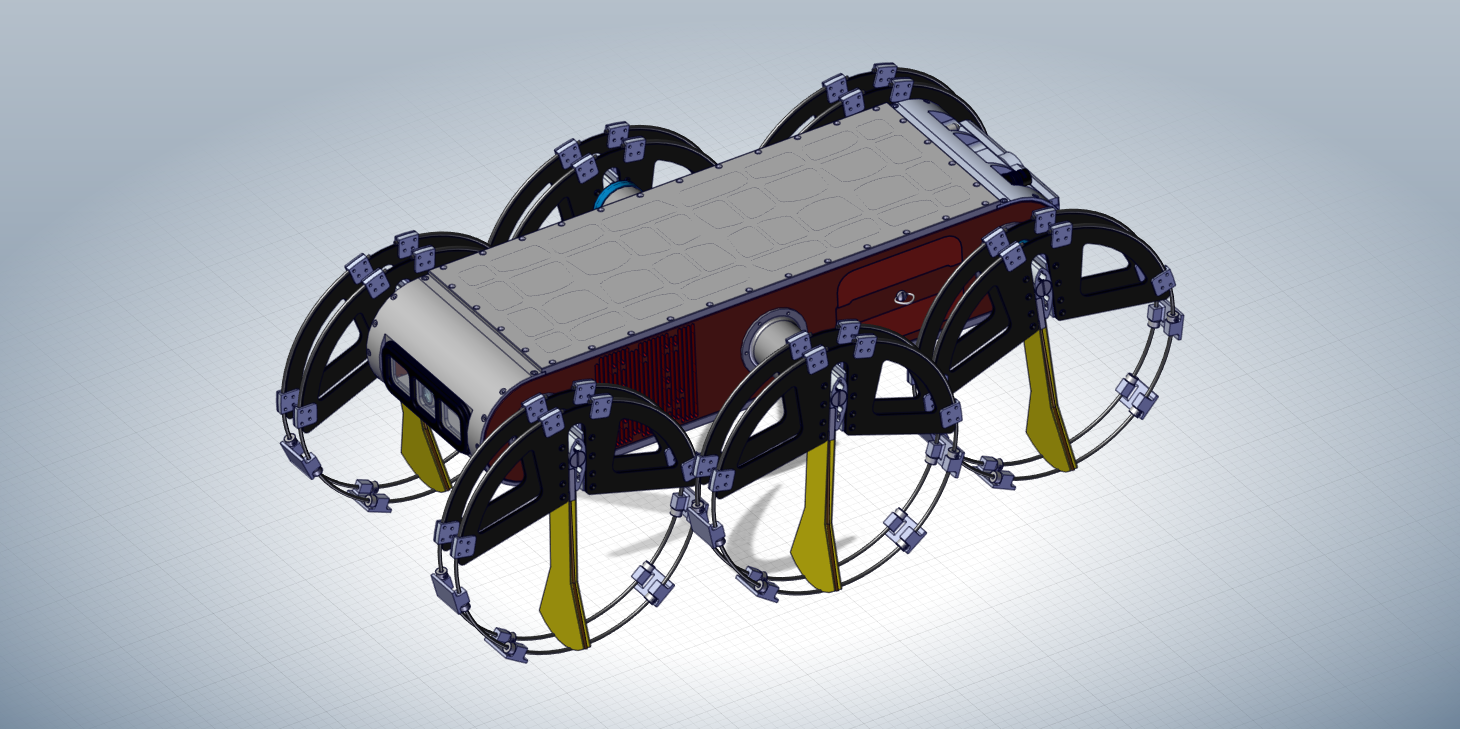
Amphibious robot
Underwater mobility
Locomotion research
AQUA
A walking and swimming aquatic robot exploring how one platform can move across surface, underwater, and bottom-contact modes without conventional thrusters.

Hazard inspection
Spherical robot
Published work
DragonBall
A visually guided spherical robot concept for hazardous environments where sealed packaging, inspection reliability, and contamination tolerance matter.
How I work
Practical robotics workflows shaped by deployment, not slide decks.
Mechanical, electrical, embedded, and field testing decisions are treated as one continuous system problem.
Frame the mission first
Start from operating constraints, retrieval conditions, payload needs, and maintenance realities before locking the architecture.
Package electronics around the vehicle
Embedded hardware, power, sensing, and structure are designed together so the platform stays balanced and serviceable.
Prototype in tight loops
CAD, fabrication, bench testing, firmware refinement, and controls integration move in fast cycles with real hardware in the loop.
Let deployment reshape the design
Failure cases, weather, launch logistics, and sensor noise become part of the specification rather than afterthoughts.
Selected notes
Field notes, engineering instincts, and design heuristics.
Short reflections on what repeatedly matters when robotics has to deal with water, contamination, noise, and imperfect retrieval.
Recovery is part of the design.
Launch and retrieval constraints often expose the true complexity of a system faster than any indoor bench test.
Instrumentation beats intuition.
Robotics builds become far easier to debug when the platform can report what the power system, sensors, and actuators are doing in context.
Novel mobility still needs boring reliability.
Interesting locomotion only matters when the vehicle is recoverable, repeatable, and robust enough to support useful missions.
Publications and research
Research outputs tied back to real systems.
Published work and research-facing references connected to the robotic platforms featured throughout the portfolio.
RoManSy 2020: DragonBall
DragonBall contributed to published work in Robot Design, Dynamics and Control, documenting the design and control considerations behind a visually guided spherical robot for hazardous environments.
Google Scholar profile
Publications, citations, and related research traces are collected on the Google Scholar profile for a broader view of the academic side of the work.
Open to robotics, embedded hardware, and field-systems collaboration.
For product work, research builds, or platform development that needs careful engineering from concept through deployment.